【机器学习】 一些入门AI的基础知识整理
概念基础
监督学习/无监督学习
监督学习
是指从带有标签(Label)的训练数据中学习模型,然后对新的无标签数据进行预测。模型通过学习输入特征(X)与输出标签(Y)之间的映射关系,建立预测函数$y=f(x)$。目标是最小化预测值和真实值之间的误差,可以通过准确率、召回率、MSE等指标量化模型性能。
| 任务类型 | 输出形式 | 典型算法 | 应用场景 |
|---|---|---|---|
| 分类 | 离散类别 | 逻辑回归、SVM、决策树、随机森林 | 垃圾邮件识别、图像分类、疾病诊断 |
| 回归 | 连续数值 | 线性回归、岭回归、XGBoost | 房价预测、销量预测、股票分析 |
适用场景:充足标注数据、预测目标明确、可解释性要求高(需要解释决策的任务诸如金融风控)
优缺点:预测精度高、可解释性强(尤其线性模型);依赖标注数据(获取成本高)、对未知分布泛化能力有限。
无监督学习
无监督学习从无标签数据中挖掘隐藏模式或结构,不提供明确的正确答案,模型自主发现数据内在规律。无需标注,目标可能是聚类、降维或者关联分析。
| 任务类型 | 目标 | 典型算法 | 应用场景 |
|---|---|---|---|
| 聚类 | 数据分组 | K-means、DBSCAN、层次聚类 | 用户分群、异常检测、推荐系统 |
| 降维 | 减少特征维度 | PCA、t-SNE、Autoencoder | 数据可视化、特征压缩、去噪 |
| 关联规则 | 发现数据项间关系 | Apriori、FP-Groth | 购物篮分析 |
| 生成模型 | 学习数据分布生成样本 | GAN、VAE | 图像生成、数据增强 |
适用场景:探索性数据分析、数据预处理(降维后供监督模型)、异常检测(聚类发现离群点)、数据生成(小样本生成)
优缺点:无需标注数据,可发现隐藏模式;难以量化评估
评估指标
对于分类问题:
混淆矩阵
| 预测为正 | 预测为负 | |
|---|---|---|
| 真实为正 | True Positive(TP) | False Negative(FN) |
| 真实为负 | False Positive(FP) | True Negative(TN) |
准确率(Accuracy)
$$
Accuracy = \frac{TP + TN}{TP + TN + FP + FN}
$$
所有预测正确的样本占比,但在类别不平衡时失效
精确率(Precision)
$$
\text{Precision} = \frac{TP}{TP + FP}
$$
预测为正的样本中实际为正的比例,关注”预测的准不准”,注重减少误报(如垃圾邮件分类中,避免将正常邮件判为垃圾)
召回率(Recall)
$$
\text{Recall} = \frac{TP}{TP + FN}
$$
真实为正的样本中被正确预测的比例,关注”找的全不全”,注重减少漏检(如癌症筛查、缺陷检测)
F1-Score
$$
F_1 = \frac{2 \times \text{Precision} \times \text{Recall}}{\text{Precision} + \text{Recall}}
$$
Precision和Recall的调和平均数,平衡精确率和召回率,适用于类别不平衡场景
假正率(FPR)
$$
\text{FPR} = \frac{FP}{FP + TN}
$$
真正率(TPR=Recall)
$$
\text{TPR} = \frac{TP}{TP + FN}
$$
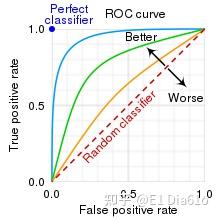
ROC曲线(Receiver Operating Characteristic)
横轴为假正率,纵轴为真正率。调整分类阈值(如逻辑回归的0.5阈值),计算不同阈值下的(FPR, TPR)点连线
左上角(0,1):完美分类器
对角线:随机猜测
曲线越靠近左上角,模型越好
AUC(Area Under Curve)
ROC曲线下的面积
取值范围:0.5(随机)~1(完美)
物理意义:模型将正样本排在负样本前面的概率
优点:
不受类别分布影响
不受阈值影响(评估整体性能)
对于回归问题
均方误差MSE(Mean Squared Error)
$$
MSE = \frac{1}{n}\sum_{i=1}^{n}(y_i - \hat{y_i})^2
$$
- $y_i$:第 $i$ 个样本的真实值
- $\hat{y_i}$:第 $i$ 个样本的预测值
- $n$:样本数量
特点
放大大误差:平方项使较大误差对结果影响更显著
单位问题:与原始数据单位平方一致(如房价预测结果为”万元²”)
可导性:光滑可导,适合梯度下降优化
应用场景
模型训练时的损失函数(如线性回归)
需要惩罚显著偏离的预测(如金融风险预测)
均方根误差RMSE (Root Mean Squared Error)
$$
RMSE = \sqrt{\frac{1}{n} \sum_{i=1}^{n} (y_i - \hat{y_i})^2}
$$
特点
恢复单位:与原始数据单位一致(如”万元”)
可比性:与MAE相比更重视大误差(因平方根弱化了MSE的放大效应)
对异常值敏感:仍受极端值影响
应用场景
业务结果汇报(单位直观)
需要平衡普通误差与大误差的评估(如房价预测
平均绝对误差MAE (Mean Absolute Error)
$$
MAE = \frac{1}{n} \sum_{i=1}^{n} |y_i - \hat{y_i}|
$$
特点
线性惩罚:所有误差等权重处理
鲁棒性:对异常值不敏感
不可导:在零点不可导,不适合直接用于梯度下降
应用场景
异常值较多的数据(如传感器数据清洗)
需要直观理解平均误差大小的场景(如库存需求预测)
R²分数(R-Squared,决定系数)
$$
R^2 = 1 - \frac{\sum_{i=1}^{n} (y_i - \hat{y_i})^2}{\sum_{i=1}^{n} (y_i - \bar{y})^2}
$$
yˉ:真实值的均值
解读
分子:模型预测的误差(MSE)
分母:基准模型(总是预测均值)的误差
取值范围:
R2=1:完美预测
R2=0:等同于均值预测
R2<0:模型比均值预测更差
特点
无量纲:不受数据单位影响
可比性:可用于不同数据集间的模型比较
易误解:高R²不一定代表模型好(可能数据本身易预测)
| 指标 | 敏感度 | 单位 | 优化适用性 | 业务解释难度 |
|---|---|---|---|---|
| MSE | 高(平方放大) | 原单位² | ★★★★★(可导) | 较难(单位平方) |
| RMSE | 中 | 原单位 | ★★★★☆ | 较易 |
| MAE | 低(线性) | 原单位 | ★★☆☆☆(不可导) | 最易 |
| R² | 相对性 | 无 | - | 需统计背景 |
对于聚类问题
轮廓系数(Silhouette Coefficient)
1. 核心思想
衡量一个样本在聚类中的紧密性和分离性,即:
同簇样本是否足够接近
不同簇样本是否足够远离
2.计算公式
对于单个样本i
$$
s(i) = \frac{b(i) - a(i)}{\max{a(i), b(i)}}
$$
$a(i)$:样本 $i$ 到同簇其他样本的平均距离(紧密性)
$$
a(i) = \frac{1}{|C_i| - 1} \sum_{j \in C_i, j \neq i} \text{dist}(i, j)
$$$b(i)$:样本 $i$ 到最近其他簇所有样本的平均距离(分离性)
$$
b(i) = \min_{k \neq C_i} \left( \frac{1}{|C_k|} \sum_{j \in C_k} \text{dist}(i, j) \right)
$$**$C_i$**:样本 $i$ 所属的簇
$\text{dist}(i, j)$:样本 $i$ 和 $j$ 之间的距离(如欧氏距离)
| 取值范围 | 聚类效果 |
|---|---|
| 0.7~1 | 聚类结果清晰,结构强 |
| 0.5~0.7 | 结构存在但可能有重叠 |
| <0.5 | 聚类效果差,样本归属不明确 |
| 接近-1 | 样本可能被分配到错误簇 |
肘部法则(Elbow Method)
1. 核心思想
通过观察簇内误差和(SSE)随聚类数K变化的拐点(”肘部”)确定最佳K值
2.计算
$$
SSE = \sum_{i=1}^{K} \sum_{x \in C_i} |x - \mu_i|^2
$$
- **$C_i$**:第 $i$ 个簇中的所有样本
- **$\mu_i$**:第 $i$ 个簇的质心(均值向量)
3. 结果解读
拐点对应的K值:通常为最佳聚类数
无明显拐点:数据可能无明确聚类结构
算法例子
线性模型
线性回归
1.最小二乘法基础原理
通过最小化残差平方和来估计参数,
残差:$e^{(i)} = h_\theta(x^{(i)}) - y^{(i)}$(预测值减真实值)
目标:找到参数 $\theta$ 使得 $\sum_{i=1}^m (e^{(i)})^2$ 最小。
目标函数(均方误差):
$J(\theta) = \frac{1}{2m}\sum_{i=1}^m(h_\theta(x^{(i)})-y^{(i)})^2$
其中:
$h_\theta(x) = \theta^T x$(假设函数,线性预测)
$m$:样本数量
$\frac{1}{2}$ 是为了后续求导方便。
2.几何解释
寻找使所有数据点垂直距离平方和最小的超平面,
二维情况:拟合一条直线,使点到直线的竖直距离平方和最小。
高维情况:拟合一个超平面,最小化残差平方和
3.解析解推导
通过矩阵运算直接求解最优参数 $\theta$。
矩阵表示:
设计矩阵 $X \in \mathbb{R}^{m \times n}$($m$ 个样本,$n$ 个特征)
标签向量 $y \in \mathbb{R}^m$
参数 $\theta \in \mathbb{R}^n$
目标函数向量化:
$$
J(\theta) = \frac{1}{2m} | X\theta - y |^2
$$对 θ 求导
$$
\nabla_\theta J(\theta) = \frac{1}{m} X^T (X\theta - y) = 0
$$
4.正则化
为了解决过拟合或不可逆问题,引入正则化项。
L1正则(Lasso):$J(\theta) += \lambda||\theta||_1$
- 产生稀疏解,可用于特征选择
L2正则(Ridge):$J(\theta) += \lambda||\theta||_2^2$
- 防止过拟合,稳定数值解
| 特性 | L1 (Lasso) | L2 (Ridge) |
|---|---|---|
| 正则化项 | $|\theta|_1$ | $|\theta|_2^2$ |
| 解是否稀疏 | 是 | 否 |
| 特征选择 | 支持 | 不支持 |
| 处理共线性 | 部分有效 | 有效 |
| 计算复杂度 | 较高(需迭代优化) | 较低(有解析解) |
逻辑回归
Sigmoid
$$
g(z) = \frac{1}{1+e^{-z}}
$$
将线性输出映射到(0,1)区间
导数特性:$g’(z) = g(z)(1-g(z))$
交叉熵损失
$$
J(\theta) = -\frac{1}{m}\sum[y\log(h)+(1-y)\log(1-h)]
$$
- 对分类任务更敏感,梯度更新幅度与误差成正比
决策树模型
基础决策树
核心思想:通过递归的if-then规则划分特征空间,构建树形结构。
关键算法:
ID3(Iterative Dichotomiser 3)
使用信息增益(Information Gain)选择特征
仅支持离散特征,容易过拟合
C4.5(改进版)
引入信息增益比处理特征取值多的偏差
支持连续特征和缺失值处理
通过剪枝(如悲观错误剪枝)降低过拟合
CART(Classification and Regression Trees)
二叉树结构,支持回归(MSE)和分类(Gini指数)
生成后剪枝(代价复杂度剪枝)
特点:
可解释性强,可视化直观
对异常值不敏感
容易过拟合(需通过max_depth/min_samples_leaf等参数控制)
随机森林(Random Forest)
核心思想:通过Bagging(Bootstrap Aggregating)集成多棵决策树,引入双重随机性降低方差。
关键技术:
数据随机:每棵树训练时Bootstrap采样
特征随机:节点分裂时从随机子集中选最优特征(√p或log2p)
投票机制:分类取众数,回归取平均
优势:
天然抗过拟合(通过树间独立性)
可并行训练(scikit-learn默认n_jobs=1需手动设置)
提供特征重要性(基于Gini不纯度减少量或排列重要性)
变体:
- Extra-Trees(Extremely Randomized Trees):进一步随机化分裂阈值
梯度提升树(GBDT/XGBoost)
1. GBDT(Gradient Boosting Decision Tree)
核心思想:通过加法模型(Additive Model)串行训练多棵弱树,沿负梯度方向迭代优化。
关键点:
损失函数:回归常用MSE,分类用对数损失
拟合残差:每棵树预测当前模型的负梯度(伪残差)
学习率(shrinkage):控制每棵树贡献,防止过拟合
2. XGBoost(eXtreme Gradient Boosting)
核心改进:
二阶泰勒展开:损失函数使用一阶+二阶导数(类似牛顿法)
正则化项:在目标函数中加入叶子节点数(γ)和权重L2范数(λ)
工程优化:
特征预排序(列块存储)
加权分位数草图(Weighted Quantile Sketch)处理缺失值
并行化设计(特征粒度并行)
| 特性 | 单棵决策树 | 随机森林 | GBDT/XGBoost |
|---|---|---|---|
| 训练方式 | 单次训练 | Bagging并行 | Boosting串行 |
| 过拟合风险 | 高 | 低 | 中等(需调参) |
| 数据敏感性 | 对噪声敏感 | 鲁棒性强 | 需处理异常值 |
| 解释性 | 最好 | 特征重要性 | 全局重要性 |
| 典型超参数 | max_depth | n_estimators | learning_rate |
支持向量机(SVM)
名词解释
支持向量:离分界线最近的那些样本点,它们决定了分界线的位置。
间隔(Margin):分界线到两侧最近点的距离,SVM的目标是最大化这个间隔。
线性可分(硬间隔)
找到一条直线w*x+b=0(超平面),使分类样本落在直线(平面)的一边,数学目标等同于最大化间隔。硬间隔要求严格可分。
线性不可分(软间隔)
如果数据存在噪声或重叠,允许一些样本点出错。数学目标引入最小化惩罚量。
线性不可分(核技巧)
数据无法用直线分开,SVM通过核函数将数据映射到高维空间使其线性可分。
聚类算法
聚类算法旨在将数据分类为若干簇,同一簇内样本相似,不同簇内样本相异。
K-means
核心思想
预先指定簇的数量(K),通过迭代优化将数据划分为K个球形簇。
中心点驱动:每个簇用一个中心点(质心)表示,数据点属于离它最近的质心对应的簇。
算法步骤
初始化:随机选择K个点作为初始质心(如K=3)。
分配数据点:计算每个点到所有质心的距离(通常用欧氏距离),将其分配到最近的质心所属的簇。
更新质心:重新计算每个簇中所有点的均值,作为新质心。
重复:直到质心不再显著变化(收敛)或达到最大迭代次数。
关键参数
K值:通过肘部法(Elbow Method)或轮廓系数选择。
初始化方法:K-Means++(优化初始质心选择)。
最大迭代次数:防止无限循环。
| 优点 | 缺点 |
|---|---|
| 简单高效,适合大规模数据 | 必须预先指定K值(可能不准) |
| 结果容易解释(球形簇) | 对初始质心敏感(可能局部最优) |
| 线性复杂度(计算快) | 只能发现球形簇,对非凸簇失效 |
| 对噪声和离群点敏感 |
DBSCAN
核心算法
基于密度:将高密度区域划分为簇,低密度区域视为噪声。
无需指定簇数量:通过数据分布自动发现任意形状的簇。
概念
核心点:在半径ε(epsilon)内有至少MinPts个邻居的点。
边界点:在ε内邻居数<MinPts,但属于某个核心点的邻居。
噪声点:既不是核心点也不是边界点。
算法步骤
随机选点:选择一个未访问的点,检查其ε邻域内的邻居数。
判断核心点:
如果邻居数≥MinPts → 标记为核心点,新建一个簇,并扩展簇(递归检查邻居)。
否则 → 暂时标记为噪声。
扩展簇:将所有密度相连的核心点加入同一簇。
重复:直到所有点被访问。
关键参数
ε(epsilon):邻域半径,影响簇的紧密程度。
MinPts:核心点所需的最小邻居数,通常取3~5。
| 优点 | 缺点 |
|---|---|
| 无需指定簇数量 | 对参数ε和MinPts敏感 |
| 能发现任意形状的簇 | 高维数据效果差(维度灾难) |
| 自动识别噪声点(抗噪能力强) | 密度不均时效果不佳 |
| 适合不规则数据分布 | 计算复杂度较高(接近O(n²)) |
降维方法
PCA(主成分分析)
核心思想
线性降维:通过正交变换,将原始特征转换为一系列线性无关的“主成分”。
保留最大方差:第一个主成分方向是数据方差最大的方向,第二个主成分与第一个正交且方差次大,依此类推。
关键步骤
中心化数据:将每个特征减去其均值(使数据以原点为中心)。
计算协方差矩阵:反映特征之间的相关性。
特征值分解:找到协方差矩阵的特征值和特征向量。
选择主成分:按特征值从大到小排序,取前k个特征向量作为新坐标轴。
投影数据:将原始数据映射到选定的主成分上。
数学表示
- 第一主成分:
$$
PC1 = \mathbf{w}_1 \cdot \mathbf{X}
$$
其中,$\mathbf{w}_1$ 是最大特征值对应的特征向量。
- 降维后的数据
$$
\mathbf{X}_{\text{PCA}} = \mathbf{X} \cdot \mathbf{W}_k
$$
其中,$\mathbf{W}_k$ 是前 $k$ 个特征向量组成的矩阵。
应用场景
数据可视化(降到2D/3D)。
特征工程(去除冗余特征,加速模型训练)。
去噪(丢弃方差小的成分)。
| 优点 | 缺点 |
|---|---|
| 计算高效,适合大规模数据 | 只能捕捉线性关系 |
| 去除特征间的相关性 | 方差小的方向可能包含重要信息 |
| 可解释性强(主成分是线性组合) | 对非线性结构失效 |
t-SNE(t-分布随机领域嵌入)
核心思想
非线性降维:专注于保留局部邻域结构,适合可视化复杂流形。
概率建模:在高维和低维空间中分别用高斯分布和t分布表示数据点的相似性,最小化两者差异。
关键步骤
计算高维相似度:对每个点 ${x}_i $,计算与邻居 ${x}j $ 的相似度(高斯分布$p{j \mid i}$)
$p_{j \mid i} = \frac{
\exp\left(-\frac{\|\mathbf{x}_i - \mathbf{x}_j\|^2}{2\sigma_i^2}\right)}{
\sum_{k \neq i} \exp\left(-\frac{\|\mathbf{x}_i - \mathbf{x}_k\|^2}{2\sigma_i^2}\right)}$
对称化联合概率:通过对称化条件概率得到联合概率:
$$
p_{ij} = \frac{p_{j \mid i} + p_{i \mid j}}{2n}
$$
- 低位映射:低维空间中的随机初始化点$y_i$使用 t 分布(自由度为1)计算相似度$q_{ij}$
$$
q_{ij} = \frac{
\left(1 + |\mathbf{y}_i - \mathbf{y}j|^2\right)^{-1}
}{
\sum{k \neq l} \left(1 + |\mathbf{y}_k - \mathbf{y}_l|^2\right)^{-1}
}
$$
- 优化目标(最小化KL散度)
$$
\text{KL}(P | Q) = \sum_{i \neq j} p_{ij} \log \frac{p_{ij}}{q_{ij}}
$$
特点
强调局部结构:邻近的点在低维中仍靠近,但全局距离可能失真。
t分布的使用:避免“拥挤问题”(高维远距离点在低维被压缩)。
应用场景
高维数据可视化(如MNIST手写数字、基因数据)。
探索性数据分析(发现隐藏的簇结构)。
| 优点 | 缺点 |
|---|---|
| 能揭示非线性结构(如簇、流形) | 计算复杂度高(O(n²)) |
| 可视化效果极佳 | 结果受超参数影响大(困惑度Perplexity) |
| 适合高维数据探索 | 不能用于特征工程(每次结果不稳定) |